|
Alfred Cueva I'm a MS student in Robotics and AI at Georgia Tech. I work under Prof. Danfei Xu, fortunate to be mentored by Shuo Cheng and Zhenyang Chen. I also collaborate closely with LIDAR Lab, supervised by Prof. Ye Zhao and Zhaoyuan Gu. Previously, I worked at Samsung as a Robotics & ML Software Engineer for 2 years, where I led end-to-end development of autonomous systems, from perception and motion planning to deployment on various robots. I received my Bachelors in Mechanical Engineering from Seoul National University during which I was a Research Intern at Dynamic Robotics System Lab, advised by Prof. Jaeheung Park and Dr. Daegyu Lim focusing on model-based priors guided Reinforcement Learning for legged robots. I also interned at Soft Robotics & Bionics Lab under the guidance of Prof. Yong-Lae Park on soft robotic multi-modal sensing for industrial robots. During my time in Korea, I co-organized a non-profit organization dedicated to AI education, AI Tech Play, and helped host the first nationwide AI camp focused on autonomous racing competitions for high school students. I am also passionate about building community and was a founding member of ASAPEC, a student-led organization for underrepresented minorities, where I organized mentorship programs and workshops to support students from diverse backgrounds. Fun Fact: I am fluent in 4 languages.
|

|
Timeline |
|
May 2026 - Present
Persona AI
Foundation model Post-training
Internship

Sep 2025 - Present
Georgia Tech x Columbia
Humanoid Loco-Manipulation
&
Pre-Training
REFINE-DP, WT-UMI
Mar 2024 - Aug 2025
Samsung
Industrial Robotics
Robotics & ML Software Engineer
Jul 2023 - Sep 2023
Samsung
Autonomy
Computer Vision Intern
Dec. 2022 - Feb. 2024
Seoul National University
Reinforcement Learning
Undergrad Researcher
|
News |
|
[Jul 2026] 🎉 Human2Any, Egoengine, and SIDO are accepted as RSS Workshop Papers. [Jul 2026] 🎉 REFINE-DP is accepted to IEEE Robotics and Automation Letters 2026. [Jul 2026] 🚨 New Paper: Egoengine. Check it out on X! [Jun 2026] 🏆 Awarded a Graduate Teaching Assistantship under Prof. Danfei Xu for CS 7643 Deep Learning. [May 2026] 🦾 Joined Persona AI as a Robotics Machine Learning Intern under Zach Fang. [Aug 2025] 📚 Started the MS Robotics program at Georgia Tech. Go Jackets! |
ResearchI aim to build general-purpose systems that can reason, plan, and act effectively in the real world, contributing meaningfully to society. Currently, my work focuses on three directions:
|
|
Human2Any: Human-to-Robot Transfer via Constraint-Aware Compositional Planning
Shuo Cheng, Chuye Zhang, Alfred Cueva, Caelan Reed Garrett, Ajay Mandlekar, Danfei Xu [arXiv] | [Website] RSS 2026 - Whole Body Control and Bimanual Manipulation Workshop (Poster) RSS 2026 - Diffusion for Robot Learning Workshop (Poster) RSS 2026 - Execution of Long-Horizon Whole Body Control Tasks Workshop (Oral) RSS 2026 - Data Centric Robotics Workshop A framework for learning reusable object-centric interaction priors from human videos without any real teleoperation data. Human2Any represents manipulation as object--object interaction motion, then composes these priors with robot-side feasibility reasoning and motion planning at deployment, so the same human-derived knowledge transfers across embodiments, scene geometries, and tasks. Validated in hardware experiments on a Franka tabletop and an RBY-1 humanoid mobile robot. Human Video · Object-Centric Priors · Task and Motion Planning · Cross-Embodiment Transfer |
|
EgoEngine: From Egocentric Human Videos to High-Fidelity Dexterous Robot Demonstrations
Yangcen Liu*, Shuo Cheng*, Alfred Cueva†,Xinchen Yin†, Woo Chul Shin†, Zhenyang Chen, Chuye Zhang, Danfei Xu [arXiv] | [Website] RSS 2026 - Dexterous Manipulation Workshop (Spotlight) A scalable pipeline that converts egocentric human videos into robot-executable demonstrations through two parallel branches: an action branch that retargets human motion with reinforcement learning refinement, and a visual branch that performs arm-hand inpainting with robot rendering blending. Together these minimize the embodiment gap and yield high-fidelity dexterous manipulation data for policy training. PyTorch · Egocentric Video · Dexterous Manipulation · Retargeting · Reinforcement Learning · Visual Inpainting |
|
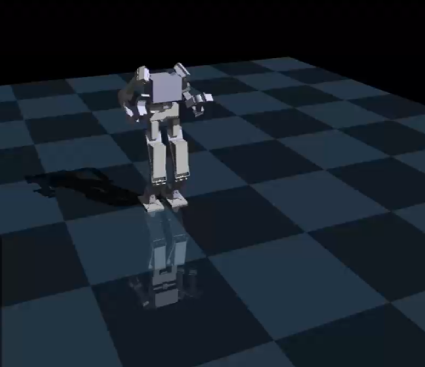
REFINE-DP: Diffusion Policy Fine-tuning for Humanoid Loco-manipulation via Reinforcement Learning
Zhaoyuan Gu*, Yipu Chen*, Zimeng Chai*, Alfred Cueva, Thong Nguyen, Huishu Xu, Yifan Wu, Amelie Kim, Issac Legene, Ye Zhao, Yongxin Chen [arXiv] | [Website] | [Video] IEEE Robotics and Automation Letters (RA-L) 2026 A hierarchical framework joint optimizing a diffusion policy (DP) high-level planner and an RL-based low-level loco-manipulation controller to mitigate distribution shift in offline-trained humanoid systems. The DP is fine tuned via PPO-based policy gradients while the controller adapts to the planner's evolving commands. Achieves >90% success on door traversal and object transport tasks, including extreme out-of-distribution scenarios with smooth real world execution. PyTorch · MuJoCo · IsaacGym · Diffusion Models · Reinforcement Learning · Whole-Body Control · Sim-to-Real |
|
WT-UMI: Tactile-based Whole-Body Manipulation via Force-Supervised Contact-Aware Planning
Jaehwi Jang*, Zhaoyuan Gu*, Alfred Cueva, Zimeng Chai, Junjie Sheng, Thong Nguyen, Himank Galundia, Yifan Wu, Huishu Xue, Isaac Legene, Ojas Mediratta, Davin Doan, Andrew Collins, Sarah Sadegh, KyoungMok Kim, Rishita Dhalbisoi, Zun Chen, Ye Zhao [arXiv] | [Website] | [Video] In Submission A wearable whole-body tactile interface, worn by human demonstrators or mounted on humanoids, that captures calibrated tactile images, contact forces, and end-effector poses for contact-rich manipulation of bulky, deformable, and shared-load objects. A force-supervised planner predicts pose and contact-force trajectories via a cross-attention force head, correcting poses into contact-aware targets and driving a tactile-based admittance controller. Across five contact-rich tasks, WT-UMI improves success rate and reduces contact-position tracking error over four policy baselines. PyTorch · Diffusion Policy · Tactile Sensing · Whole-Body Control · Sim-to-Real |
|
Static In, Dynamic Out: Counterfactual Action Augmentation for Moving Object Manipulation
Woo Chul Shin, Zhenyang Chen, Alfred Cueva, Nadun Ranawaka, Yingyan Celine Lin, Benjamin Joffe, Shreyas Kousik, Danfei Xu [arXiv] | [Website] RSS 2026 - Robot Data Centric Workshop A counterfactual action augmentation for moving object manipulation. SIDO displaces the object to a predicted future pose and morphs the demonstrated action chunk to preserve hand-object relative pose, enabling any visuomotor policy trained on static demonstrations to generalize to unseen object motion at test time. It is policy agnostic and compatible with any off-the-shelf motion predictor. |
|
VIPER: Video-Instructed Physics-grounded Embodied Reward
In Submission Vision-language models (VLMs) are used to perform principled frame selection from demonstration videos and extract physics-grounded reward signals for RL training. By grounding reward computation in physically meaningful video frames, robots can learn complex behaviors from raw video without manual reward engineering. PyTorch · VLMs · Reinforcement Learning · Reward Shaping · Video Understanding |
|
|
Autonomous Drilling Robot for Cluttered Environments
Project at Samsung (Smart Construction Robotics Challenge Winner) [Video] | [Coverage] Led development of autonomous drilling robot for construction sites, deploying rule-based computer vision and motion planning for precise surface drilling with ±2mm accuracy. System handles 20kg payloads and operates in GPS-denied cluttered environments, reducing human exposure to hazardous tasks by 80%. Deployed across 5+ Samsung Factory sites. ROS2 · OpenCV · Motion Planning · Force Control |

|
Adaptive AMR for Safe and Efficient Material Transport
Project at Samsung, in collaboration with Hyundai Robotics [Coverage] Led development and deployment of adaptive AMR fleet (300+ robots) for material transport in construction sites. Implemented safety-aware navigation achieving 92% successful delivery rate in dynamic, GPS-denied environments. System handles 200kg payloads with real-time obstacle avoidance and multi-robot coordination. ROS2 · LiDAR SLAM · Nav2 · Fleet Management · Motion Planning |
|
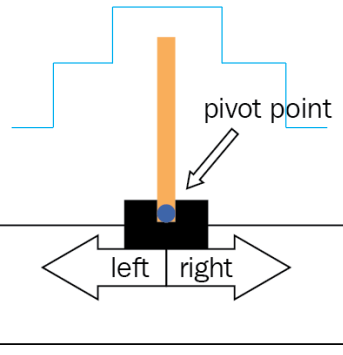
RL-Policy Guided Optimal Design of Parallel Elastic Actuator for Weak Actuation of Bipedal Robot
Alfred Cueva, Jaeheung Park, Yong-Lae Park [Code] | [Report] Bachelor's Thesis (Outstanding BS Thesis Presentation Award) Developed meta-RL optimization framework combining model-free learning with physics-based actuator models for bipedal locomotion. Achieved 40% energy reduction in simulated bipedal walking while optimizing parallel elastic actuator stiffness parameters. Framework demonstrated successful sim-to-real transfer potential for weak actuation scenarios. MuJoCo · PyTorch · MAML · Model-Based RL |
Work Experience |
|
|
Persona AI
Robotics Machine Learning Intern May 2026 - September 2026 Work on Vision-Language-Action Models and World Models for Robotics. |
|
|
Samsung
Robotics & ML Software Engineer Mar 2024 - Aug 2025
Spearheaded end-to-end YOLOv8 perception pipeline for mobile robots in harsh industrial environments, from dataset creation (10K+ images) to on-device optimization and CI/CD integration, achieving 92% detection accuracy with 30ms inference latency across 5+ Samsung sites.
PyTorch · ROS2 · Isaac Sim · YOLOv8 · SLAM · Embedded ML · CI/CD |
|
|
Samsung
Computer Vision Intern Jul 2023 - Aug 2023
Developed real-time heat anomaly detection system for semiconductor manufacturing equipment using custom ML architecture and GPU-accelerated pipelines, achieving 95% detection accuracy with <100ms latency for proactive maintenance alerts.
PyTorch · SAM · OpenCV · GPU Optimization · Sensor Fusion · Real-Time Systems |
Projects |
|
Diffusion Policy for Multi-Step Block Assembly
Alfred Cueva*, Seok Joon Kim*, Kyle Kam* [Report] | [Video] | [Code] Graduate Course Project (Deep Reinforcement Learning, Fall 2025) Implemented transformer-based diffusion policies for long-horizon visuomotor manipulation, focusing on sequential pick-and-place and multi-block assembly. Integrated camera-calibrated ArUco-based 6DoF pose estimation with action diffusion for closed-loop execution on UR10e robot. Achieved 85% success rate on 3-block assembly tasks with 200+ teleoperated expert demonstrations. PyTorch · LeRobot · ROS · OpenCV · ArUco Markers · UR10e |
|
Multi-Modal Perception for Autonomous Maze Navigation
Alfred Cueva*, Carlos Gaeta* [Code] Graduate Course Project (Introduction to Autonomy, Fall 2025) Designed end-to-end ROS2 autonomous navigation stack integrating LiDAR-based Bug0 obstacle avoidance with vision-based traffic sign recognition using KNN classifier. Deployed on TurtleBot3 platform for autonomous maze navigation with real-time sign detection and adaptive waypoint generation. Achieved 95% sign recognition accuracy across 10+ maze configurations. ROS · Python · OpenCV · TensorFlow · LiDAR · TurtleBot3 |
|
|
Reinforcement Learning Agent for Rapid Task Adaptation
Alfred Cueva*, Gene Chung*, Taehung Kim*, Sumin Ye* [Code] | [Report] Graduate Course Project (Reinforcement Learning, Spring 2023) Developed Task-Invariant Agent (TIA) network for multi-task RL, enabling rapid adaptation to new tasks using model dynamics. The architecture integrates a modified DQN policy network, an encoder for latent task representation from experience sequences, and a model predictor for system dynamics. Achieved 3x faster adaptation to new reward functions compared to baseline DQN, demonstrating robust generalization across CartPole task variants. PyTorch · OpenAI Gym · DQN · Meta-Learning |
|
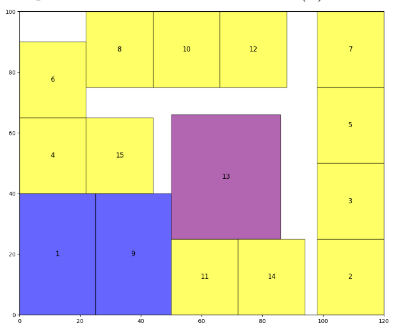
Constrained 2D Online Bin Packing Problem using Reinforcement Learning
Alfred Cueva [Code] | [Report] Graduate Course Project (Combinatorial Optimization, Spring 2023) Implemented Heuristics Integrated Deep RL approach for online 2D bin packing with placement constraints. Trained PPO agent to learn optimal packing strategies that outperform traditional heuristics. Achieved 15% improvement in space utilization over baseline greedy algorithms. PyTorch · PPO · OpenAI Gym · Combinatorial Optimization |
|
Control Techniques for Humanoid Robots
Alfred Cueva [Code] Graduate Course Project (Theory and Practice of Humanoid Walking Control, Fall 2022) Implemented 10+ humanoid control algorithms including ZMP-based walking pattern generation, Linear Inverted Pendulum Model, preview control, and whole-body operational space control. Developed CoM estimation using complementary filters and capture point-based stabilization for dynamic walking on simulated bipedal robots. C++ · MATLAB · Whole-Body Control · QP Solvers · Trajectory Optimization |

|
RC Car Autonomous Driving
Alfred Cueva*, Max Acosta* [Code] Graduate Course Project (Introduction to Intelligent Systems, Spring 2023) Developed autonomous driving system for RC Car Racing Challenge using LiDAR-only perception for mapless navigation. Implemented behavior cloning with Gaussian Process Regression to learn driving policy from expert demonstrations. Trained end-to-end control policy mapping raw sensor observations to steering and throttle commands. Achieved top-3 finish in class competition with average lap speed of 2.5 m/s while maintaining safe wall clearance of 15cm. Python · PyTorch · LiDAR · Gaussian Process · Behavior Cloning |
|
Soil Sensing with Machine Learning and Satellite Imagery
Alfred Cueva*, Andy Kim* [Code] Graduate Course Project (Deep Learning, Fall 2023) (Funded by National Research Foundation) Led research estimating soil health from satellite imagery for agricultural policy enforcement. Managed $8K grant and directed field surveys across 50+ sites, collecting 100GB of GIS and satellite data. Engineered 30+ novel features from multi-spectral satellite data and GIS sources, training machine learning models (XGBoost, Random Forest) for regression. Achieved 60% improvement over baseline estimates (R² = 0.78) using ensemble methods. Python · Scikit-learn · XGBoost · Sentinel-2 · GIS |
Services
|
|
Template from Jon Barron. |